ACADIA's 'Robotic Softness' Workshop
(via Archinect)
The Association for Computer Aided Design in Architecture (ACADIA) conference 2016, hosted by the Taubman College of Architecture and Urban planning at the University of Michigan, is a preeminent platform to discuss design philosophies and acknowledge new realms of work done by individuals or organizations among the architectural community. The Institute for Computational Design at the University of Stuttgart’s contribution to the field of computational design and architecture has been immense, and the workshop gave us valuable insight into the technology and know-how being developed at the there.
Through the seven ACADIA’s workshops, we participated in “Robotic Softness: Behavioral Fabrication Process of Woven Structures,” led by Lauren Vasey, a Research Associate from the ICD and Giulio Brugnaro, a graduate of the ITECH Master’s Program at the University of Stuttgart who is currently also pursuing his PHD at The Bartlett School of Architecture. The three day workshop was structured around the goal of introducing us to the concept of “Robotic Softness”, envisioned as a flexible and evolving framework for robotic fabrication in which the design linked with the fabrication process enables continuous feedback loops. Vasey and Brugnaro defined four main directions of investigation for the workshop as: material behavior and fabrication-informed design; scanning and machine vision; online robotic control; and behavioral fabrication strategies.
To understand the core of these concepts better, Vasey offered a brief background on the work at ICD, which included an in-depth explanation of the context of ideas behind behavioral design and fabrication methods. The presentation discussed the progression of utilizing computational design and robotic fabrication in architecture and fabrication research. The advent of new technologies including sensor feedback can challenge conventional linear ways of making and production. It was interesting to consider programming robots with behaviors in contrast to following notational systems of representation. We realized that architecture is on the edge of shifting from task-specific machinery to a more advanced generic robotic tool. This shift from machine developed for explicit fabrication processes towards flexible and behavioral fabrication tools gives designers and makers the opportunity to design and fabricate complex and intricate geometries.
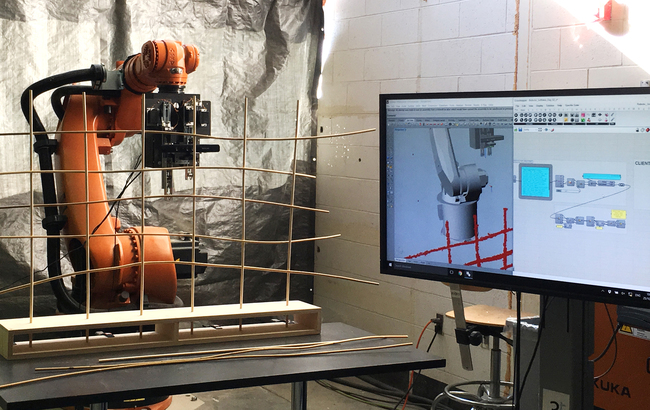
The work builds on a robotic weaving fabrication method Brugnaro developed as part of his Master’s thesis in the ITECH master’s program, with advisors Vasey and Ehsan Baharlou under the direction of Prof. Achim Menges. This robotic process allows a six-axis robot arm to weave three-dimensional woven structures inspired by the construction logic used by the weaverbird in the making of its nest. Brugnaro demonstrated a custom weaving robot end-effector tool and an integrated sensing strategy which utilized a 3D-scanning process with the Xbox 360 Kinect.
An agent-based computational system was presented that generates the robot’s movements in real time. This Agent weaving system is based on two fundamental loops, local and global. Brugnaro explained the local loop deals with the direct manipulation of the material with the weaving end effector. While on a bigger scale, the global loop deals with the overall woven structure and the decision-making processes which allow different performance criteria or goals to inform development.
Read more on Archinect.